This "SKY NEWS" type text will scroll from right to left - Breaking News !! - Hi, my name is Mick the creator of MSTP - I started this website in 1998 28 years ago and it was very basic and i left it for 24 years, , , All code was edited in a TXT file as in the old way and i still do to this day. . . Five years ago i decided to use it and spent one week learning how to code menu's, email contact, adding video and MP3 playback, and surprised at the play video code being just one short line [video controls="controls" src="LF.mp4"] that was Awesome , , , At first i decided having a guestbook, it worked perfect but a nightmare with people hijacking it posting garbage with nothing to do with my website or it's content, so i removed the guestbook, , , I then decided to have a send E-mail contact option with the form controlled and email sent from the remote web server, a local send is not reliable, this is a must for any website.
"ATLAS 003" Video - Performing in January 2025 - IT BLOWS YOUR MIND and looks kinda CREEPY !!
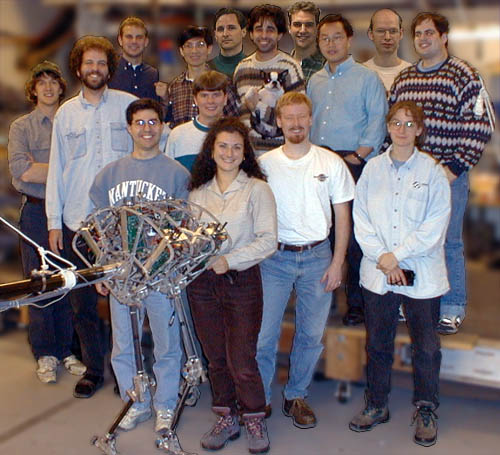
At rai - Reinforcement Learning Accelerates Humanoid Behavior Production
Reinforcement learning is used to speed the production of behavior for the Atlas humanoid robot. At the heart of the learning process is a physics-based simulator that generates training data for a variety of maneuvers. The control policy tracks and controls retargeted human motion data. Each maneuver is created with data from about 150 million runs of the simulator and transferred zero-shot to the hardware. This work is part of a collaboration between the RAI Institute and Boston Dynamics.
"Transferred zero-shot to the hardware" refers to the capability of machine learning models, particularly in robotics and control to be trained entirely within a simulation environment and then deployed on real physical hardware without any further training, fine-tuning, or real-world data collection. This process aims to eliminate the "reality gap," allowing models to handle unexpected contact, new environments, or complex dynamics immediately upon deployment.
Ai Tech is gonna explode exponentially in the next 10-15 years - So the future decendants of "ATLAS 003" will have it all !!
Atlas, Boston Dynamics' most dynamic humanoid robot, is designed with a focus on advanced mobility and dexterity. This robot is fully electric and utilizes an intricate actuator system, making it capable of complex, agile movements. Atlas is equipped with 28 joints and advanced control algorithms that enable it to execute tasks with high precision and adapt to its environment. The robot’s design allows it to perform physically demanding tasks like running, jumping, and even executing backflips, demonstrating significant advancements in humanoid robotics.
Atlas is notable for its construction materials and structural design, which emphasize a high strength-to-weight ratio. The robot incorporates titanium and aluminum, extensively using 3D printing technology to optimize its frame for robustness while maintaining a relatively low weight of 89 kg. This engineering approach grants Atlas the ability to perform dynamic movements and actions, such as somersaults and balancing tasks, which require both strength and lightweight components to maintain high levels of performance and efficiency.
The potential applications of Atlas extend beyond demonstrations of agility and power. Boston Dynamics leverages Atlas to explore the practical uses of humanoid robots in real-world scenarios that require a blend of human-like mobility and robotic precision. While Atlas is primarily a platform for research and development, its capabilities hint at future roles in scenarios like disaster response, where navigating hazardous or complex terrains is necessary, or in jobs that require high levels of mobility and manipulation skills. Atlas represents a significant step toward the integration of humanoid robots into everyday tasks and environments.